Physics Overview
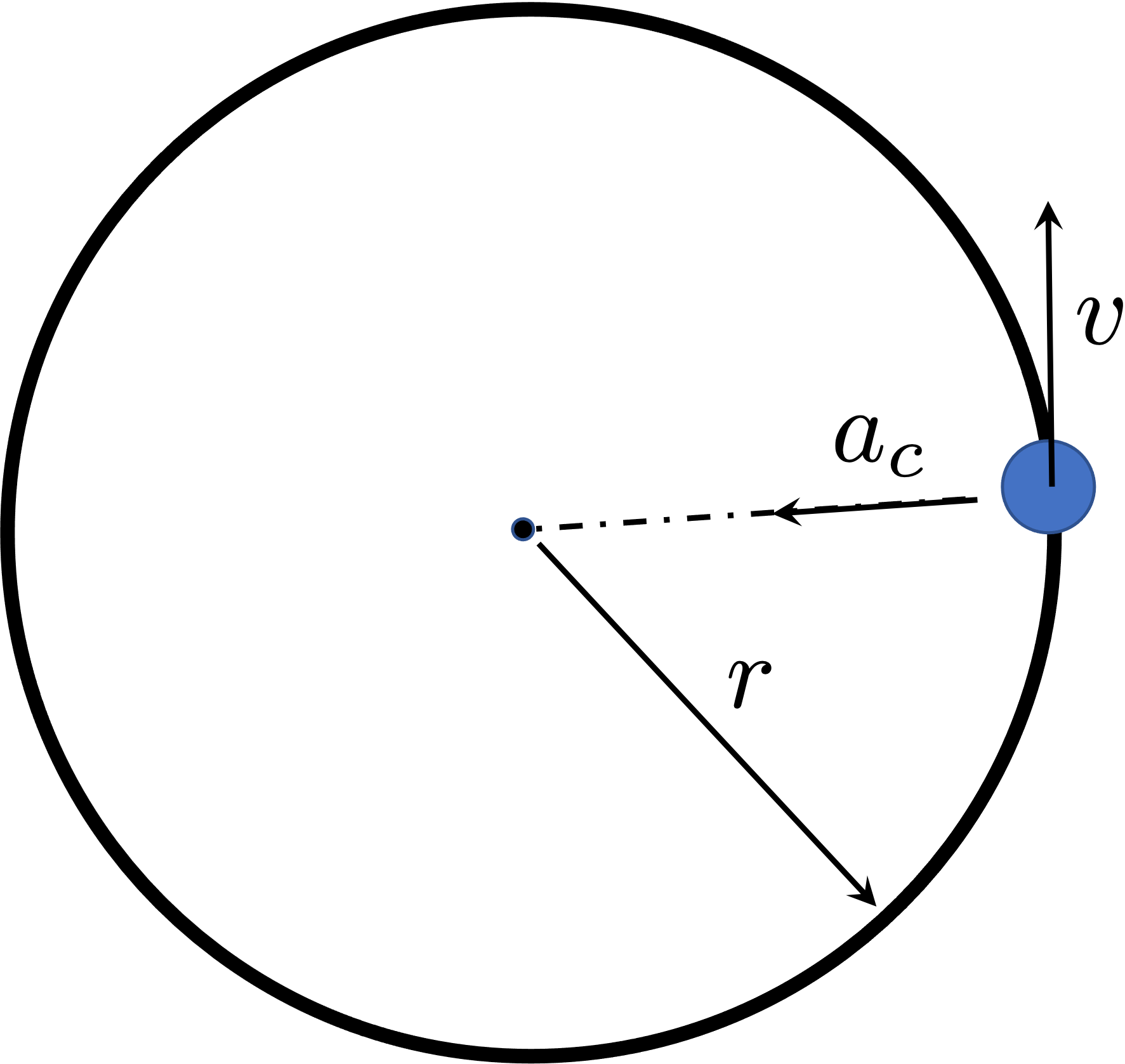
If an object is constrained to move along a circular path, there must be a constraining agency that makes the object move along a circular path. This can be envisioned using the example shown in Figure 1, which shows an object moving along a circle or radius \(r\). At the moment shown, the object has a tangential velocity \(v\), and it has an acceleration that points to the centre of the circle - the centripetal acceleration \(a_c\). This constraining agency is a net force that acts on the object. In general, this force will have two components; a radial and a tangential one. If the tangential component of the force is zero then the motion is uniform circular motion, and if this component is non-zero, then the motion is called non-uniform circular motion.
The rotational velocity or angular velocity of the object as it goes around the circle is defined quite simply as the rate of change of angle with respect to time. Hence it is defined as:
\[ \omega = \frac{d\theta}{dt}, \label{eq:omega_def}\]
and this in turn has a straight-forward relationship with the tangential velcoity;
\[ v = \omega r. \label{eq:vomegar}\]
Thus for an object moving along a circle of a given radius, if the velocity is constant then it implies that the rotational velocity will likewise also be constant. This is the condition for uniform circular motion. In such a scenario the there is no tangential acceleration and the only acceleration that the object has is due to the centripetal force alone, and the centripetal acceleration is given by,
\[ a_c = \frac{v^2}{r} = r \omega^2.\label{eq:a_c}\]
Note that the direction of the centripetal acceleration is perpendicular to the tangential velocity, and therefore it does not change the magnitute of the velocity. However, if there is a tangential acceleration as well, then it has the effect of changing the magnitude of the tangential velocity. Tangential acceleration is defined as,
\[ a_\textrm{tan} = \frac{dv}{dt} = r \frac{d\omega}{dt}.\label{eq:a_tan}\]
The rate of change of the angular velocity (\(\omega\)) with respect to time is by definition the angular acceleration (\(\alpha\)), thus we can write:
\[ a_\textrm{tan} = r \alpha. \label{eq:atan2} \]
Thus when the angular acceleration is zero, then the tangential acceleration is zero and the object executes uniform circular motion, and if it is non-zero then the object executes non-uniform circular motion.
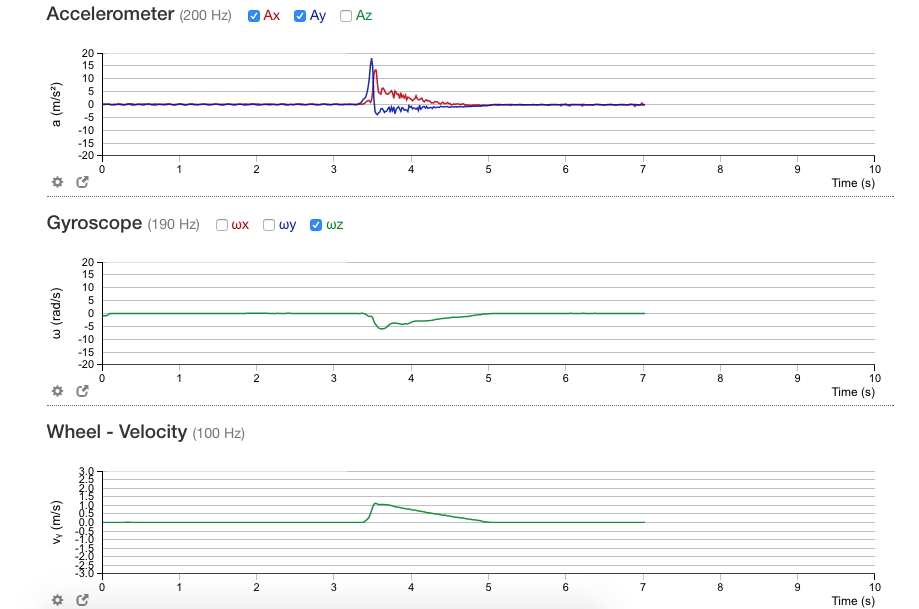
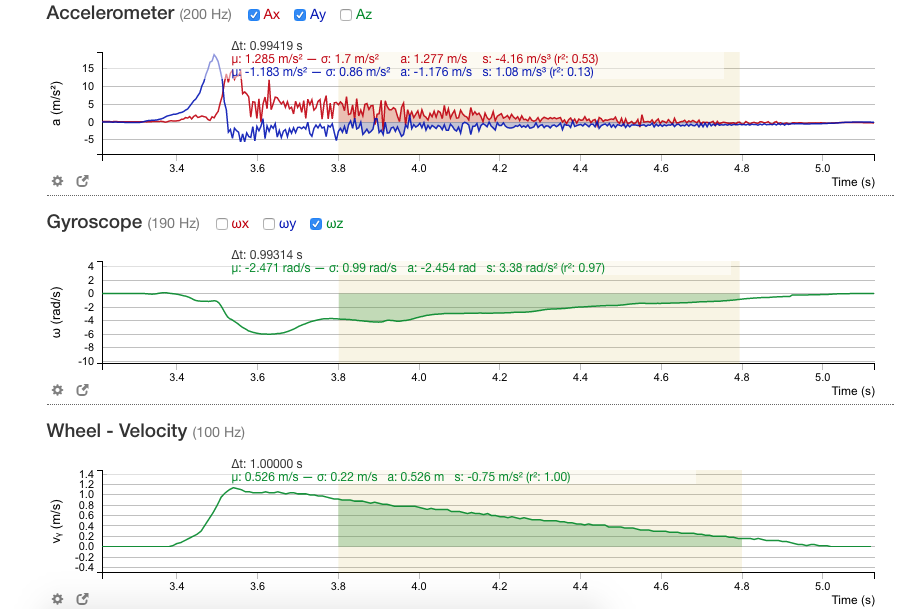
In today's lab you will be experimentally verifying the relationships given in Eqs. \eqref{eq:vomegar}, \eqref{eq:a_c} and \eqref{eq:atan2}.
If you would like to get a quick video refresher about non-uniform circular motion, see the following video.